🛰️ Sentinel-1 时间序列 InSAR 数据处理完整流程 (基于GMTSAR)
🎯 本文将详细介绍如何使用 GMTSAR 软件对 Sentinel-1 数据进行时序 InSAR 处理,包括数据准备、预处理、配准、干涉图生成、相位解缠、最终时序分析等步骤。
🤔 文中没有提供的脚本,默认使用GMTSAR官方脚本,可直接调用。
🧭 处理流程概览
- 📁 数据准备
- 📚 图像配准
- 🌈 差分干涉
- 🌊 合并子条带
- 🗺️ 检查干涉对
- 🔓 相位解缠
- ☁️ GACOS大气校正
- 🛠️ SBAS解算
- 🧵 SBAS后处理
- 📈 形变时间序列提取
1. 📁 数据准备
首先按照子条带F1 F2 F3,对数据进行处理,文件目录设置如下: 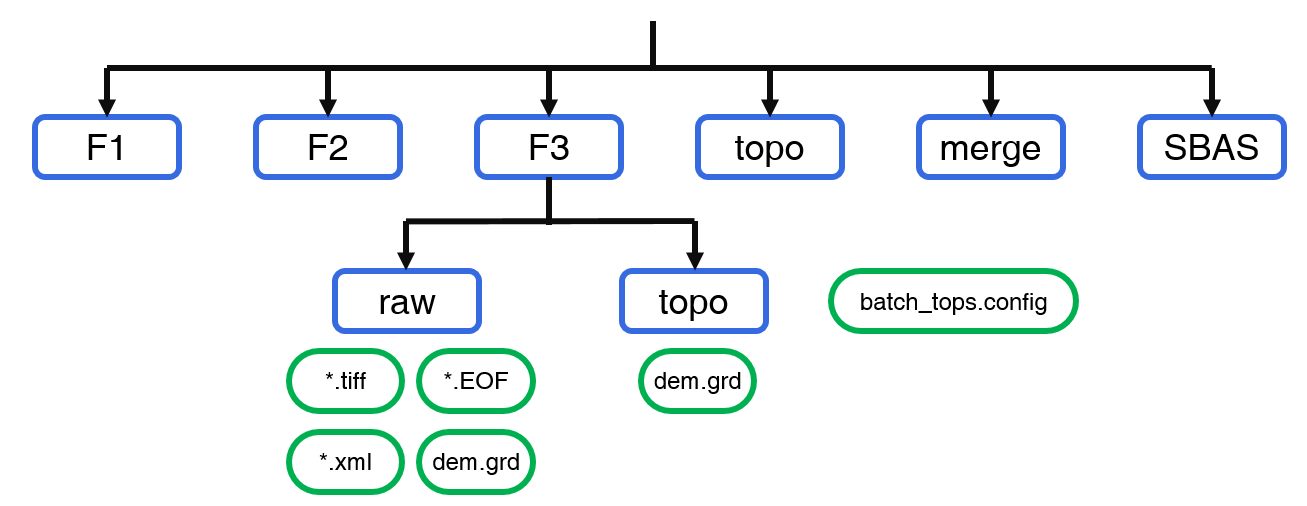
将相应的
*.tiff*.xml文件链接至raw/目录, 在raw目录执行以下命令:1
link_S1.csh Sentinel-1/data/path swathnumber
将轨道
*.EOF文件链接至raw/目录, 在raw目录执行以下命令:1
link_S1_orbits.csh Sentinel-1/orbit/path
此时会生成一个
data.in文件,其中具有数据文件名(无后缀)和轨道,用:分隔将DEM
dem.grd文件分别链接至raw/topo/目录。
2. 📚 图像配准
- ⚙️ 首先进行粗配准,运行脚本
1
preproc_batch_tops.csh data.in dem.grd 1
完成后会生成一个
baseline_table.dat文件,其中包含数据的基线信息。可以将该文件移动至上层目录, 避免精密配准中,该文件重复生成。S1_20180201_ALL_F1 2018031.1874165505 1491 19.088688436880 56.434825714407 S1_20180207_ALL_F1 2018037.1879020806 1497 -55.518698696406 -34.273719507112 S1_20180213_ALL_F1 2018043.1874162052 1503 -41.389270891689 -22.026755662146 S1_20180219_ALL_F1 2018049.1878994363 1509 -50.211739839015 -25.142105633455 S1_20180225_ALL_F1 2018055.1874136333 1515 -20.370088939888 16.909205059498 S1_20180303_ALL_F1 2018061.1878994068 1521 -45.495652914617 -13.8650482657401
mv baseline_table.dat ../- 检查
baseline.ps文件,在基线图中间选择超级主影像,使所有影像在下一步的精密配准中与其配准。
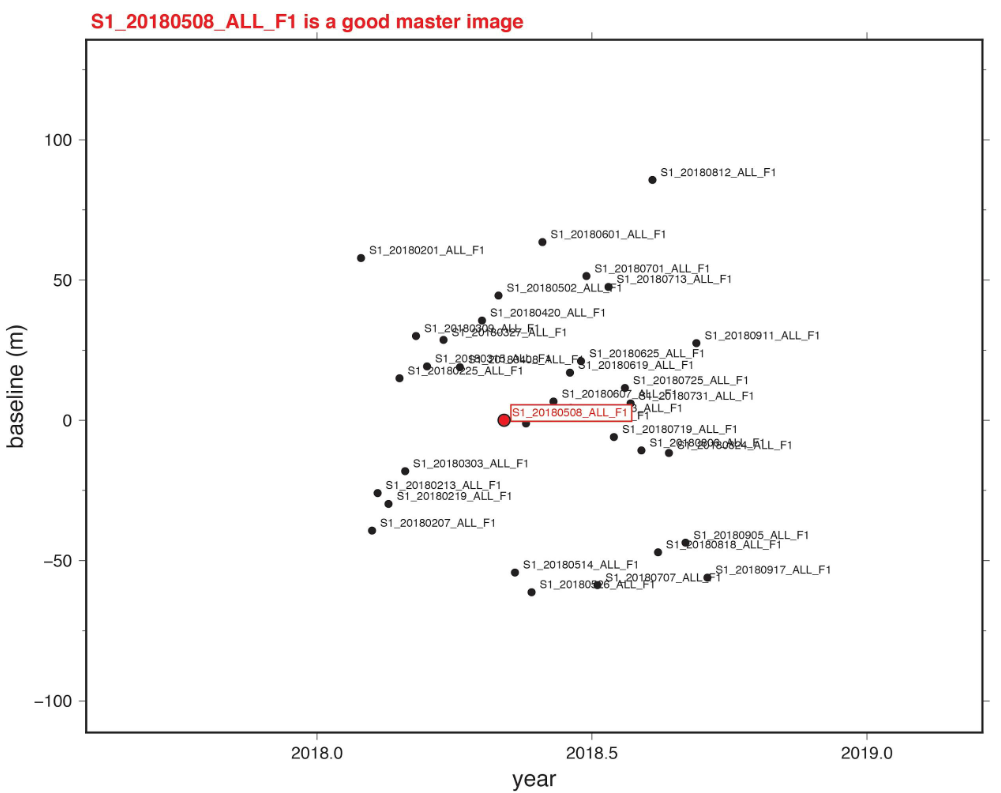
- 检查
⚙️ 再进行精密配准 将
data.in中超级主影像所在行移动到文件第一行,然后进行精密配准。- 运行脚本,进行精密配准
1
preproc_batch_tops.csh data.in dem.grd 2
在其余子条带
F2F3中重复上述操作
- 运行脚本,进行精密配准
3. 🌈差分干涉
- 🧾 首先准备干涉列表,例如在
F1目录下运行:1
select_pairs.csh baseline_table.dat 50 100
注意:50是时间基线阈值,干涉对时间间隔小于50;100是垂直极限阈值,干涉对垂直基线阈值小于100米。脚本会生成满足条件的
intf.in文件,如下所示:S1_20180508_ALL_F1:S1_20180514_ALL_F1
S1_20180508_ALL_F1:S1_20180526_ALL_F1
S1_20180508_ALL_F1:S1_20180607_ALL_F1
S1_20180508_ALL_F1:S1_20180520_ALL_F1同时也会生成时空基线图,检查是否有未连接的影像,手动添加干涉对,使时空基线图完整,没有单独的干涉对或影像。
手动调整后,可通过代码重新绘制新的时空基线图
1
plot_baseline.csh intf.in baseline_table.dat
🧾 修改配置文件
batch_tops.config"# 1 - start from make topo_ra"
"# 2 - start from make and filter interferograms, unwrap and geocode"
"proc_stage = 1"
🌟🌟🌟默认为1,从反向地理编码,生成topo_ra.grd开始。topo_ra.grd文件生成以后,可修改为2,进行并行处理。master_image = S1_20180426_ALL_F1
🌟修改为对应的超级主影像。注意F1 F2 F3也需要对应。range_dec = 8
azimuth_dec = 2
🌟多视参数调整,若研究区很小,可修改为4:1。dec_factor = 1
🌟小范围取1,大范围取2,分辨率会降低,提高运算效率。threshold_geocode = 0
🌟🌟🌟地理编码选项,默认为0.12(做地理编码转为地理坐标系)。实际处理中,有单独的地理编码步骤,此处不需要地理编码,需要设为0- 🌈🌈🌈 差分干涉!!!
- 建议先将batch_tops.config中proc_stage改为1,对一个干涉对进行干涉,并检查。
1 2
head -1 intf.in > one.in intf_tops.csh one.in batch_tops.config
- 一旦完成,再次编辑batch_tops.config,将proc_stage改为2,跳过创建topo_ra文件。便可进行并行干涉处理。
1
intf_tops_parallel.csh intf.in batch_tops.config 10
所有干涉对都存放在
intf_all文件夹中,干涉图如下图所示: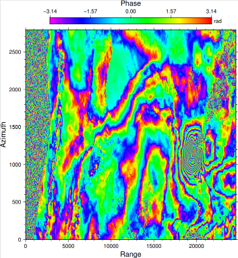
剩余条带
F2F3的处理,仅需将F1目录中的intf.in和batch_tops.config复制过来,并修改为F2F3即可。
4. 🌊 合并子条带
- 合并子条带前,需要先准备好干涉对列表文件
intflist(注意不是intf.in)。 在其中一个子条带(F1/F2/F3)的intf_all目录下执行以下命令生成intf_list文件1
ls -d 20* > intf_list
- 然后在
merge目录下,使用create_merge_input.csh脚本,生成merge.in1
create_merge_input.csh intf_list path mode
mode 0 是合并 3 个subswaths, mode 1 是合并 F1/F2, mode 2 is 合并 F2/F3
例如:create_merge_input.csh intflist .. 0 > merge.in ⚠️注意将含有超级主影像日期的行全部置顶,确保所有图像都使用相同的坐标处理,并且最终网格大小相同。
- 将配置文件
batch_tops.config复制到merge目录,dem.grd也链接过来。1 2
cp ../F2/batch_tops.config . ln -s ../topo/dem.grd .
- 合并子条带 运行脚本:
1
merge_batch.csh merge.in batch_tops.config
在合并完第一个干涉对后,会生成
trans.dat文件。- 💡 (可选)若干涉对数量巨大,可选择并行操作,需要在生成
trans.dat文件后,终止上个命令。运行并行脚本:1
merge_batch_parallel.sh inputfile config_file
- 💡 (可选)若干涉对数量巨大,可选择并行操作,需要在生成
5. 🗺️ 检查干涉对
由于数据本身、处理过程、操作失误等因素,部分干涉对出现错误,我们需要检查并剔除错误干涉对。
我们先将干涉图绘制出来,使用脚本:
1
./select_phasefilt.csh mode
mode 1将建立
phasefilt_all文件夹,汇总所有的干涉对以便查阅。错误干涉图在此删除即可。 mode 2将剔除的干涉图对应的文件夹移动到rm文件夹中。
6. 🔓 相位解缠
相位解缠是InSAR时间序列处理中最耗时的步骤之一。在平坦干燥地区,解缠速度较快;而在地形复杂,植被覆盖的地区,相位解缠准确度较低。
- 在
merge目录中,首先制作一个干涉图列表🧾1
ls -d 20* > intf.list
- 运行解缠脚本
1
unwrap_intf.csh intf.list
运行前需要先修改解缠参数
"snaphu.csh correlation_threshold maximum_discontinuity [<rng0>/<rngf>/<azi0>/<azif>]"
💡相干性阈值correlation_threshold一般选0.02 - 0.1,maximum_discontinuity地震相位跳跃,一般取0,[<rng0>/<rngf>/<azi0>/<azif>]为解缠范围,默认全部解缠。 🌟🌟🌟通常为提高运算效率,我们选择并行解缠:
1
./unwrap_parallel.csh intf.list 10
当前目录需要放置一个unwrap_intf.csh文件,注意与之前的不同,不需要循环语句,内容大致如下:
1 2 3
cd $1 snaphu[_interp].csh 0.02 0 cd ..
📢📢📢 如果在这一步,设置了解缠范围。需要将相干性文件
corr.grd进行对应的裁剪,使用脚本:1
corr_cut.csh intf.list
7. ☁️ GACOS大气校正 (选做)
GACOS大气校正能够较好的去除与地形相关的对流层大气误差, 通常我们用GACOS进行大气校正。
🎉 GMTSAR 最新版支持 GACOS 大气校正脚本!
2025 年 7 月 2 日发布的GMTSAR github脚本,已正式集成我们贡献的 GACOS 大气校正脚本! 现在,安装最新版 GMTSAR 后,可以直接调用内置脚本进行 GACOS 大气校正,使用更便捷,集成更紧密。📂 脚本说明
GMTSAR 中提供两个 GACOS 大气校正脚本:
make_gacos_correction.csh:标准串行版本make_gacos_correction_parallel.csh:并行版本(推荐)
🚀 如何使用(以并行脚本为例)
在
merge/目录下,使用如下命令运行并行大气校正脚本:1
make_gacos_correction_parallel.csh intflist GACOS_path ref_range ref_azimuth dem.grd Ncores
参数说明:
参数 含义 intflist干涉图列表文件(每行为一对干涉图) GACOS_pathGACOS 数据所在路径(示例: /GACOS_path/)ref_range参考点的 Range 方向像素坐标 ref_azimuth参考点的 Azimuth 方向像素坐标 dem.grd匹配 InSAR 的地形高程文件 Ncores并行运行使用的核心数量
💡 参考点选择:请在研究区中选取稳定点,获取 ref_range 和 ref_azimuth。详细计算方法见下节说明。
- 该并行脚本会自动调用 make_gacos_correction.csh 逐个干涉图执行大气校正任务。
如果没有使用最新版的GMTSAR,也可以自行下载官网脚本,或使用下面脚本(版本较老)。在
merge目录下,我们选择并行gacos校正:make_gacos_correction_parallel.csh
make_gacos_correction.csh1
make_gacos_correction_parallel.csh intflist Ncores
脚本会调用
make_gacos_correction.csh脚本进行大气校正,需要修改参数信息:
set gacos_path = /GACOS_path/ # GACOS file (*.ztd, *.rsc) path
set pixel_center = 41347
set line_center = 2422
💡这是参考点的雷达坐标,一定要修改,选择研究区内稳定参考点。地理坐标系转雷达坐标系(参考点):
1
proj_ll2ra_ascii.csh trans.dat points_ll.txt points_ra.txt
至少需要三个点才能转换,三个点不能离得太近,不能在一条直线。
格式为xyname👀 解缠和gacos校正后的干涉对仍需检查,需剔除(或重新处理)错误干涉对,可在
merge目录执行脚本:1
gacos_select.csh intf.list
8. 🛠️ SBAS解算
- 准备输入文件,使用脚本自动生成,需要将
intf.in和baseline_table.dat复制到SBAS目录,运行:1
prep_sbas.csh intf.in baseline_table.dat ../merge unwrap.grd corr.grd
若采用了GACOS大气校正,
unwrap.grd应改为unwrap_gacos_corrected_detrended.grd脚本会生成intf.tab和scene.tab,以及一行简单的SBAS指令- 若在前几步删除了一些干涉对(yyyyddd_yyyyddd),此时对应的intf.in应重新生成,可使用脚本:
1
intflist2intfin.sh intf.list intf.in
我们在命令行输入sbas指令:
1
sbas intf.tab scene.tab N S xdim ydim [-atm ni] [-smooth sf] [-wavelength wl] [-incidence inc] [-range -rng] [-rms] [-dem]
输入参数:
intf.tab -- 干涉对列表
scene.tab -- SAR数据列表(天数从2014年1月1日起算)
N -- 干涉对数量
S -- SAR数据的数量
xdim and ydim -- 干涉图的尺寸
-smooth sf -- 平滑因子,默认为0,一般选3
-atm ni -- 大气校正(CPS方法)迭代次数,默认为0(跳过校正),一般选3
-wavelength wl -- 雷达波长
-incidence theta -- 入射角,在xml中可以查看(incidence)
-range rng -- 雷达到干涉图中心的距离,在PRM文件中可以查看(near range)
-rms -- 形变速率的均方根误差 rms.grd
-dem -- 输出的dem误差 dem_err.grd
-mmap -- 使用硬盘代替运行内存,降速明显
-robust -- only work with -atm turnned on, estimate velocity with records that has atm correction
输出参数:
disp_##.grd -- 累积形变量 (mm)
vel.grd -- 形变速率 (mm/yr)
9. 🧵 SBAS后处理
求出的
disp_##.grd和vel.grd需要进一步处理才能变为我们最终的结果。
首先修改文件名,将
disp_##.grd修改为日期命名,运行脚本:1
post_sbas.csh
然后进行掩膜和地理编码,这两步同时进行。此时的数据还是雷达坐标系,需转为地理坐标系。
先进入merge目录计算干涉对平均相干性,操作如下:
1 2 3
ls */corr.grd > corr.list stack_corr.csh corr.list meancorr.grd mask_meancorr.csh meancorr.grd thresholds
thresholds一般取0.12
再将相干性阈值文件
mask_file和地理编码文件trans.dat链接到SBAS目录,运行脚本:1
proj_disp_ra2ll.csh disp_ra.list mask_file
生成
yyyymmdd_mask_ll.grd与vel_mask_ll.grd文件
接着进行参考点校正,注意修改脚本里的参考点坐标。
1
make_reference.csh
生成
yyyymmdd_mask_ll_referenced.grd与vel_mask_ll_referenced.grd文件绘制累积形变时间按序列图:
1 2
ls 20*referenced.grd > disp_referenced.list plot_disp_ll_zxj.csh disp_referenced.list -300 100
绘制形变速率图:
1
plot_grd.csh vel_mask_ll_referenced.grd -60 20该脚本适用于绘制任何WGS84坐标的栅格数据
grd文件转kml, 用于在Googleearth中查看:
1
grd2kml.csh vel_file cpt_flie
10. 📈 形变时间序列提取
时间序列分析是InSAR的关键环节,我们在这里介绍如何提取一些点位的时间序列。
首先需要创建一个
points.list, 里面每一行包含一个点的信息, 格式为xyname
同时需要存在一个grd_list, 即我们要提取的累计形变栅格文件,一般为disp_referenced.list,执行脚本即可生成特征点的时间序列。1
extract_ts_std.csh
脚本中,
gmt grdclip mask.grd -Sa0.2/NaN -Sb0.2/1 -Gmask.grd,其中0.2即200米圆形范围内取平均,可根据需求修改。若需要快速提取特征点的时间序列,且不需要范围内取平均,可采用以下脚本,能够大大提高提取速度。
1
extract_ts_track.csh
使用以下脚本可以快速绘制时间序列图像:
1
plot_timeseries.csh name_ts_disp.txt